Hey there!
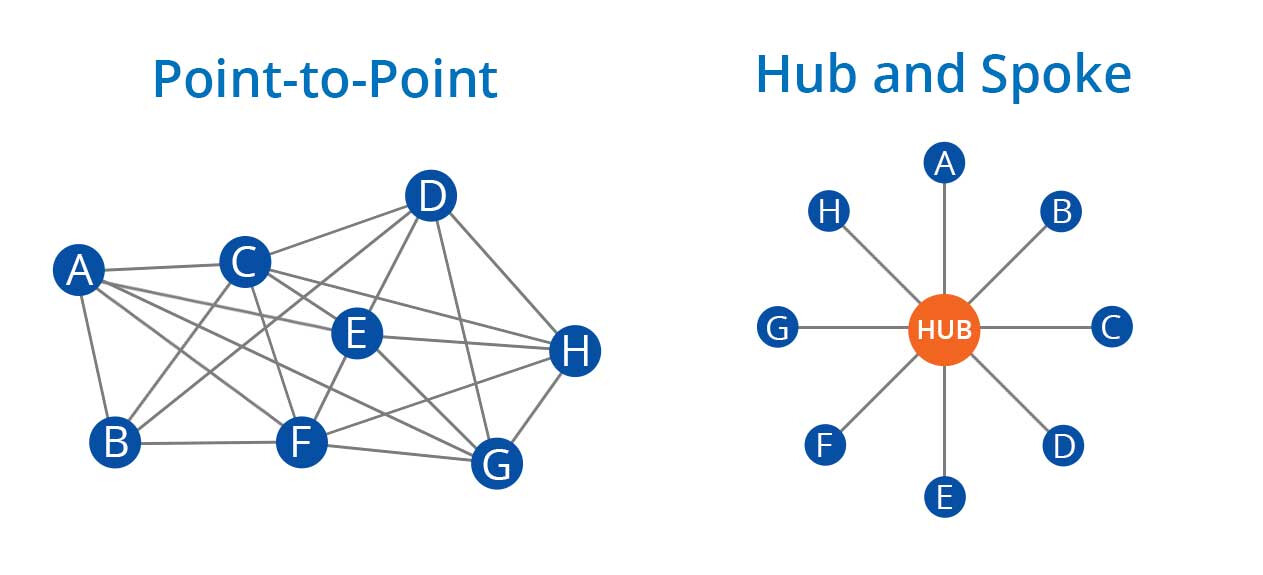
When I first configured Syncthing on my (5) devices, I opted for a “point to point” (“mesh”) topology. It seemed benefitial at the time, as it would let the initial sync happen a fair bit quicker.
Now that everything is done syncing, I’ve noticed that I get a fair bit of conflict files, particularly when I’m rapidly changing and saving files (e.g. when I’m programming).
I suspect that this happens from loops in the topology. Imagine this scenario:
- Device A saves a version 1 of a file
- Device A syncs the file to device B
- Device A modifies the file to version 2
- Device B syncs version 1 of the file to device C
- Device C tries to sync version of the file with device A, where it now conflicts with its version 2 of the same file.
Is this issue possible?
Would it be advisable to have a hub-and-spoke topology (or at least one with no cycles)?